Auto ECAS design based on Freescale HCS08 Abstract: An automotive electronically controlled air suspension system with Freescale MC9S08GB60 microcontroller as the control core is designed. It focuses on the hardware circuit system and specific circuit design, and introduces the key points of software design. Through bench tests in the laboratory, it was verified that the system effectively improved the suspension dynamic stroke, wheel dynamic load and vertical acceleration of the vehicle body relative to the passive suspension system, while improving the body height adjustment control while improving Comfortable vehicle ride. And the circuit structure is simple, the stability is good, and it has the value of practical application. Fig 1 Electronically controlled air suspension structure Figure 2 Body height detection circuit Fig 3 the structured flowchart of main program Figure 5 (b) Vertical acceleration Figure 5 (c) Wheel dynamic load High Frequency Ferrite Transformer,Electric Transformer,Core Type Transformer,Frequency Transformer IHUA INDUSTRIES CO.,LTD. , https://www.ihua-coil.com
Keywords: MC9S08GB60 electronic control unit air suspension
Design of the Vehicle's Electronically controlled air suspension system Based on Freescale HCS08 QuanLi 1 XiePing1 BaiLu2 (1.Jiang Su University, InsTItute of Electric Engineering, JIANG SU ZHEN JIANG 212013
2. HEBI technical school HENAN HEBI 458000)
Abstract: The Vehicle's electronically controlled air suspension system were designed, which
use a microcontroller Freescale MC9S08GB60.Emphasizes the circuit of the hardware system, meanwhile, introduces the key point on the software design. The bench test in laboratory cerTIfied that the ECAS relaTIve passivity-suspension, it improved three impotent index arm effecTIvely, which are suspension's moving distance, acceleration in vertical and the cartwheel moving loading.it improve the vehicle's ride comfortable when controlling the ride height. The system is simple structure, stability and practical.
Keywords: MC9S08GB60 ECU Air Suspension
0 Introduction Air suspension mainly includes passive suspension and controllable electronic suspension. The passive suspension suppresses and reduces the dynamic load and vibration of the car body and wheels to a certain extent, ensuring the driving safety and riding comfort of the vehicle. However, since the stiffness and damping coefficient of the passive suspension are generally selected empirically, it is only optimal under certain circumstances, and once the load, road conditions, speed and other factors change, the passive suspension cannot be automatically adjusted accordingly, let alone manually. . To overcome this shortcoming, the Electronic Air Suspension System (ECAS)
Resulting from this. ECAS is currently the most advanced automotive suspension system. It can automatically adjust suspension stiffness and body height with changing factors such as road conditions, load, speed, etc., reducing air consumption, and has the advantages of rapid response, easy installation, simple operation, etc. Therefore, controllable electronic suspension has become a hot topic in the field of automotive electronics research, and it has broad development prospects.
1 Composition and principle of ECAS Electronically controlled air suspension system is composed of electronic control unit (ECU), height sensor, air spring, speed sensor, shock absorber, vehicle height control keyboard and so on. The ECU detects the height of the vehicle body in real time through the height sensor, indirectly obtains the vertical acceleration of the vehicle body, and at the same time detects the driving speed of the vehicle through the speed sensor. Several index heights and three-level adjustable damping values ​​are stored in the ECU. The index height is consistent with the spring comfort, driving safety, and application specifications. Under different driving conditions, the vehicle speed is automatically executed by the ECU for the corresponding index height, and the height and damping value can also be manually controlled by the driver. By comparing the detection result of the height sensor and the index height, if the height difference exceeds a certain tolerance range, the solenoid valve will be excited, and the actual height will be adjusted to the index height by inflation and deflation. The damping force of the shock absorber is divided into three gears. The shock absorber is controlled according to the ascent speed and acceleration of the vehicle body, and the corresponding damping force is implemented to meet the requirements of car ride comfort and riding comfort. The structure of the electronically controlled air suspension is shown in Figure 1. 
2 Design of each functional module of ECAS system
ECAS is mainly composed of 6 major functional modules, namely central processing unit, signal input module (ie sensor signal),
Signal output module (that is, output of control quantity), operation interface module, power supply module, other modules (external memory, RS485
Communication, system upgrade expansion port).
2.1 MC9S08GB60
The single chip microcomputer is the core component of the ECU. It must often process a large number of input and output signals, and must achieve high precision and real-time control. This design uses the enhanced 8-bit automotive microcontroller of the US Freescale Corporation-MC9S08GB60
MCU. There are 64K flash and 4K E2PROM in the MCU, and four serial communication ports are highly integrated
(SCI1, SCI2, SPI, I2C), up to 8 timers (PWM), 8-channel 10-bit A / D conversion module.
2.2 Signal sensor input module This module is mainly composed of 3 height sensors and 1 speed sensor. Body height sensor equivalent inductance series resistance. The equivalent inductance corresponds to about 20mH at 0 ° turn angle, about 8mH at -45 ° turn angle, and about 35mH at + 45 ° turn angle.
The equivalent resistance is 120Ω. To this end, an LC three-point oscillation circuit is designed to detect the signal from the body height sensor, that is, a sine wave generator is designed, which is composed of TL082 components and peripheral circuits. The frequency of the sine wave continuously changes with the change of the equivalent inductance of the height sensor. Then a square wave whose frequency changes continuously with the inductance comes out through the comparator, and is input to the input capture port of the MCU after being amplified by the transistor and isolated by the optocoupler. The MCU detects the signal transmitted by the height sensor by detecting this constantly changing frequency. The circuit is shown in Figure 2. The detection of the speed sensor signal is also achieved by detecting its frequency.
The principle is similar to the height sensing input circuit. 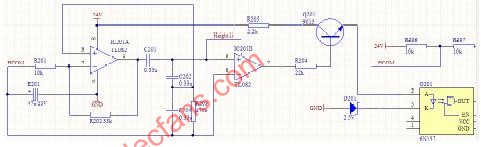
Fig 2 detection circuit of vehicle's height
2.3 Signal control output module
The ECU adopts the PWM method to control the opening of the solenoid valve, and outputs a control signal according to the deviation between the current actual height and the expected adjustment height. The ECU calculates the adjustment pulse length of the solenoid valve. If the height to be adjusted is large and there is no risk of overshoot, the ECU will give a long pulse. At the same time, the fast ascent speed will reduce the pulse length, so that the vehicle can be accurately controlled The height adjustment speed greatly avoids the height overshoot and oscillation adjustment. For the drive of the solenoid valve, the NUD3124 relay driver chip produced by ON Semiconductor is selected for this design. The NUD3124 (automotive version) device's high reverse avalanche energy capacity (350mJ) can control most relays used in automotive applications. The control signal is output to the NUD3124 driver chip after being isolated by the optocoupler. The NUD3124 drives the solenoid valve to work, and a diode protection circuit is added to the output end of the NUD3124.
2.4 Power module, operation interface module and other extended function modules
ECAS system has two main voltage sources, one is 24V voltage source, and the other is 3V voltage source. The 3V voltage source is divided into digital voltage source and analog voltage source. The 24V power supply is derived from the vehicle's own power supply, and then filtered by a π-type filter, then stabilized by a voltage regulator tube, and finally a stable 24V voltage source is obtained through a filter circuit. The 3V voltage source is similar to this, except that an isolation resistor needs to be added between the digital power supply and the analog power supply to prevent crosstalk.
The operation interface is mainly keyboard input and LED display. When the driver wants to manually control the damping and the vehicle height, he can input his operation through the keyboard, and then the corresponding light-emitting diode lights up to show his input. The keyboard input is filtered, optocoupler isolation and IC106 filtering and protection, and finally sent to the ECU, and then the ECU output control drives the corresponding light-emitting diode to light.
Other modules mainly include interfaces for future upgrades, as well as RS485 communication and large-capacity memory. The large-capacity memory adopts AT24C1024 of ATMAL, which is connected to the single-chip computer through PTC2 / SDA and PTC3 / ​​SCL; RS485
The typical connection method is sufficient. The chip uses max3485; other unused pins are led out through the slot for future upgrades.
3 Automotive ECAS software design scheme The air suspension electronic control unit (ECAS) application software consists of the system initialization module, judgment manual automatic height adjustment module,
The signal acquisition module, keyboard response module, output control module and so on are composed. The main program is a cyclic body, which is responsible for adjusting the body height and damping. The body height signal is converted into a square wave signal with a certain duty ratio by the sensor, and then compared with the preset calibration height preset in the microprocessor and output The control signal, when it reaches the calibration height, reduces the duty cycle of the output signal to prevent overcharging. The specific main program block diagram is shown in Figure 3. 
4 Test and result analysis This design did a two-degree-of-freedom 1/4 vehicle air suspension test. By comparing and analyzing the electronically controlled air suspension and the passive air suspension under the same road excitation under certain frequency characteristics, different results were obtained. Suspension dynamic travel, vehicle dynamic load and vertical acceleration to verify the feasibility of this design [4], to verify whether this design achieves the purpose of improving vehicle ride comfort and riding comfort. Provide technical reserves and test methods for the next step to convert scientific research results into automotive electronic products.
This test system uses 8800 numerical control hydraulic servo vibration test system of American INSTRON company, air spring, shock absorber, controller designed in this paper, acceleration sensor, body height sensor, speed sensor, Wavebook signal collector, computer, etc. The test principle is shown in Figure 4. Two additional sensors are added to the test system, namely an acceleration sensor and a pressure sensor. These two sensors are added to measure the vertical acceleration of the spring and the dynamic load of the tire. In this test, the excitation signal is a white noise random input signal that simulates a B-level road surface and a vehicle speed of 50km / h. The test time is 30s, the sampling interval is 0.01s, and the working height of the air spring is 275mm. The air suspension and controller are collected before and after. The vertical vibration acceleration of the sprung mass, the dynamic stroke of the suspension and the dynamic load of the tire. The experimental results are shown in Figure 5. Through this experiment, we can see that the electronically-controlled air suspension system designed in this paper is obviously more obvious than the passive suspension in the three indicators of the dynamic travel of the suspension, the dynamic load of the vehicle and the vertical acceleration. Improvement, in which the rms value of the vertical vibration acceleration of the sprung mass decreased by 12.89%, indicating that the controller designed in this paper effectively improves the driving smoothness of the wheels and obtains better suspension characteristics, which has practical application value. ! 
Fig5 (b) acceleration signal in vertical vibration Fig 5 (c) cartwheel moving loading