1 Introduction The application of car airbags has saved the lives of many occupants. However, as more and more applications of automobiles occur, airbag error pop-ups sometimes occur, which in turn threatens the safety of the occupants, so the control performance of the airbag must be improved. Therefore, we also need to further study the airbag control algorithm. This article refers to the address: http:// Figure 1 Airbag schematic The second is the reliability of the airbag, which is the anti-jamming of the impact signal caused by sudden braking, overpass and other non-destructive collisions. Acceleration signals from cars driving on bumpy roads or at very low speeds may cause the airbags to falsely trigger. A good control system should be able to identify these signals so that they do not cause non-destructive collisions in the car. The airbag system is turned on by mistake. Figure 2 Schematic diagram of the moving window algorithm where t is the current time, w is the time window width (sampling time width), and ax(t) is integrated to obtain the index S(t, w), when S(t, w) exceeds the preset When the value is fixed, an ignition signal is issued. n is the current time point, k is the number of sampling points, and f is the sampling frequency. S(n,k,Ï) is a bidirectional synthetic integral quantity, n, f, k are defined as above; Ï is a synthesis factor, which characterizes the weight of the two directions acceleration in the synthesis algorithm. This kind of algorithm mainly considers the acceleration factor when the car collides. When the integral of the acceleration reaches a certain value, it means that the collision intensity of the car also reaches a certain value, which will bring certain damage to the occupant. Moreover, this algorithm is also very advantageous for judging the optimal ignition timing. After experiments, the ignition timing obtained by this algorithm is only a few milliseconds from the optimal ignition timing of the collision with the car (using the camera) [2], Meet the required accuracy. Figure 3 Function waveform diagram When v exceeds 30km/h, the value of y is greater than 1; otherwise, it is less than 1. The commonly used standard now is that the airbag detonating speed used in conjunction with the seat belt is generally: when the front wall hits the fixed wall below 20km/h, it should not be exploded. When it is more than 35km/h, it must be exploded. Between 20km/h and 35km/h, it is a range that can be exploded or not. So we take v0=30km/h as the standard point, so combined with the above moving window integration algorithm, propose a new S1, then S1 is: S' is the double acceleration synthetic integral amount added to v and c. The advantage is that it can reduce the chance of false triggering of the airbag and better protect the safety of the occupant. Considering that the sensitivity of detonating the airbag when v>v0 does not need to be too large, it can be adjusted appropriately. Figure 4 function waveform diagram The Bayesian decision rule based on the minimum error rate is: If P(w1|x)> P(w2|x), then x is classified into the pop-up state w1, otherwise P(w1|x) x is the sample vector, w is the weight vector, and w0 is a constant. In practice, w and w0 can be calculated from a large number of samples in the above database. After g(x) is obtained, a set of eigenvalues ​​detected in practice can be evaluated to determine whether to detonate the airbag. Figure 5 Schematic diagram of the classification function As shown in Figure 5, the classification function g(x) can distinguish the two states (the detonated airbag and the non-explosive airbag) well, realizing the instant judgment of the collision state of the car. This algorithm only requires the system to perform a table lookup operation, which greatly reduces the amount of calculation.
portable charging power station 80000 mAh Portable Power Station portable power station 300w
with LED Light 1000W Digital Display Multifunctional Portable Power Station Fast Charging Power Bank
Portable Power station 800W 1000W 5000W Boluo Xurong Electronics Co., Ltd. , https://www.greenleaf-pc.com
Today, the advantages and disadvantages of automotive airbag technology are not whether it can judge the collision and achieve ignition. The key to modern airbag control is to achieve ignition and anti-interference against non-destructive collisions at the optimal time. Only when the best time is ignited can the driver and passengers be better protected.
The best time is determined by the fact that during the collision of the car, the occupant moves forward to the airbag, and the airbag just reaches the maximum volume, which is the best protection. If the ignition is slow, the occupant is still inflated when the occupant is in contact with the airbag, which will cause additional damage to the occupant. If the ignition is fast, the occupant can shrink when the occupant touches the airbag, and the airbag can not play the best buffering effect on the occupant's collision, and the occupant can not be well protected. 
The third is the basic indicators of airbag control technology, including the avoidance of the following: 1 airbags may open at very low speeds. When the vehicle is driving at a very low speed and a collision accident occurs, as long as the driver and the occupant are fastened to the seat belt, the airbag does not need to be opened for protection. At this time, the opening of the airbag causes unnecessary waste. 2 When the passenger deviates from the seat or the seat is unmanned, the start of the airbag system will not only fail to protect it, but may also cause certain damage to the passenger [1].
2 Several algorithms for airbag ignition control 1) Acceleration method This algorithm measures the acceleration (deceleration) of a car collision, and pops up the airbag when the acceleration exceeds a preset threshold.
2) Velocity variable method The algorithm obtains the acceleration change amount by integrating the acceleration of the vehicle, and pops up the airbag when the acceleration change exceeds a preset threshold.
3) Acceleration Slope Method This method is to obtain the amount of change in acceleration as the index for judging whether or not to ignite.
4) Moving window integration algorithm [2]
The acceleration curve is integrated over a certain period of time, and when the integrated value exceeds a preset threshold, an ignition signal is issued.
2.1 Moving window integration algorithm The following describes the moving window integration algorithm in detail, and selects the following observations as the condition indicators for airbag ignition. 1 Horizontal acceleration (or deceleration) ax when the car collides. Ax is a signal that directly reflects the intensity of the collision, and ax plays a key role in the selection of the best ignition timing. 2 In the vertical direction of the acceleration of the car ay, the airbag control system joins ay to play a large anti-jamming effect on the non-collision signal. When the car has a positive collision, ay and ax have great inconsistency [3]; When the car is disturbed by the road surface, for example, the car directly collides with the higher step, ay and ax have great consistency [3], and the interference signal can be discriminated thereby.
Combining these quantities, a best indicator for determining the ignition of the airbag is obtained.
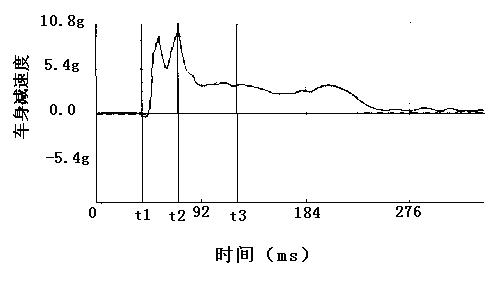
It is necessary to sample the value of ax (from the start of the collision), according to the value of this series to judge the intensity of the collision. The airbag ignition control algorithm should make the ignition judgment within 20~30ms after the collision, because the airbag expands to the maximum It takes about 30ms [4]. When the initial velocity of collision is 28.4km/h, the time for the human body to move forward 5inch to reach the contact airbag is about 70ms, then the target ignition timing is 70-30=40ms, so the airbag should be opened. At 40 ms after the collision, the algorithm must make an ignition decision within 20 to 30 ms. This can sample 20 acceleration values ​​after collision (frequency is 1kHZ) as the input value of the algorithm. This can also be sampled for the vertical direction. Then you can get two sets of values: ax (1), ax (2) ... ax (20); ay (1), ay (2) ... ay (20).
The processing of ax in the moving window algorithm is (1):  (1)
(1) 
Write in discrete form, as in equation (2):  (2)
(2)
After adding vertical acceleration, it can improve the anti-interference ability of road surface interference [3], the form is as shown in formula (3):  (3)
(3)
However, this algorithm also has its shortcomings, such as not considering the speed of the collision and the factors of people in the seat, so that when the car is running at low speed, it may still cause false triggering. If the speed and the signal of someone on the seat are introduced, the chance of false triggering can be further reduced.
2.2 Improved algorithm proposed by data fusion From the above description, we can know that the mobile window integration algorithm judges whether the airbag is popped or not based on the integral amount S. Now we can make some modifications to the integral amount to overcome the above shortcomings. The specific approach is as follows, add the following observations:
(1) The horizontal speed v, v of a car collision can reflect the degree of damage to the passenger during a car collision. The greater the v, the greater the kinetic energy of the passenger and the greater the damage suffered during the collision. v is the most direct indicator of whether the airbag should be opened. (2) Is there a signal from the occupant in the seat [5]. When there is no seat, when the collision occurs, the airbag can not be ejected. This can reduce the chance of false triggering and avoid damage to other occupants.
Introducing function  The waveform of this function is:
The waveform of this function is: 
 (4)
(4)
Thus, when v>v0, the sensitivity of the car ignition detonation is greater than the original; and v  (5)
(5)  The coefficient is 1/âˆ, and the y function graph is shown in Figure 4.
The coefficient is 1/âˆ, and the y function graph is shown in Figure 4.
As can be seen from Fig. 4, after the algorithm with the speed function is added, the sensitivity to v>v0 is appropriately increased, and the effective reduction is also made.
In order to reduce the amount of calculation and make the ignition control speed more rapid, a pattern recognition method can be adopted. The principle is as follows. In the trolley crash test, the improved moving window algorithm with the speed function proposed in the second section is used to judge different inputs (acceleration and velocity) and their results, and record them to obtain a database. . By using the pattern recognition method and combining a large number of records, the discriminant function of the airbag ignition judgment of a certain vehicle type can be obtained. Then in the actual application, the discriminant function can be used to directly discriminate the input acceleration and speed, and classify the car state (the airbag pop-up and the airbag does not pop-up), thereby greatly reducing the calculation amount. 
3 Designing the discriminant function principle The pop-up (w1) and non-pop-up (w2) of the airbag can be attributed to the judgment of the n-group feature observations (a1, a2....an, v) of the object (collision of the car) The acceleration and velocity of the car collision are characteristic observations), thereby classifying x=[a1, a2....an, v]. In the categorization, we always want the error rate to be the smallest, so Bayesian decision based on the minimum error rate can be used [6].
By counting the above database, we can get the probability P(w1) of the airbag pop-up, so that P(w2)=1-P(w1).
To classify x, you also need a class conditional probability density. p(x|w1) is a conditional probability density of x observed in the airbag pop-up state; p(x|w2) is a class-like probability density of observing x in a state in which the airbag is not popped up. This way we can calculate the posterior probabilities of w1 and w2, as in equation (6):  (6)
(6)  (7)
(7)
A schematic diagram of g(x) in the case of two dimensions is shown in FIG. 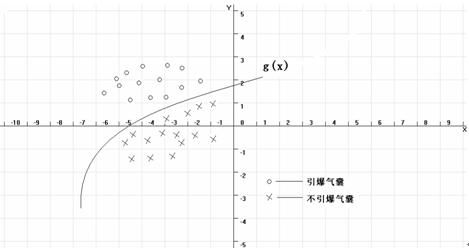
4 Summary In summary, the mobile window algorithm has shortcomings in anti-jamming at low speed; and the improved algorithm with speed function can increase the sensitivity of the system at high speed, and reduce the false trigger probability of the airbag at low speed. The control requirements of modern airbags; the control algorithm of pattern recognition is based on the correct control algorithm in front, and uses a large amount of historical data to obtain the discriminant function, so as to directly judge whether the airbag is popped up, and greatly reduce the calculation amount.