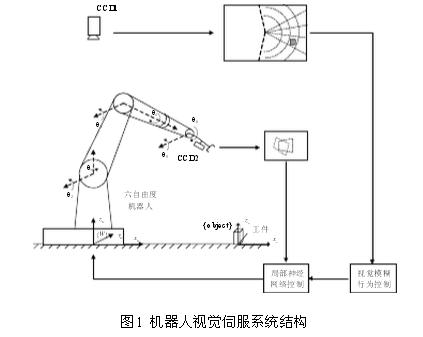
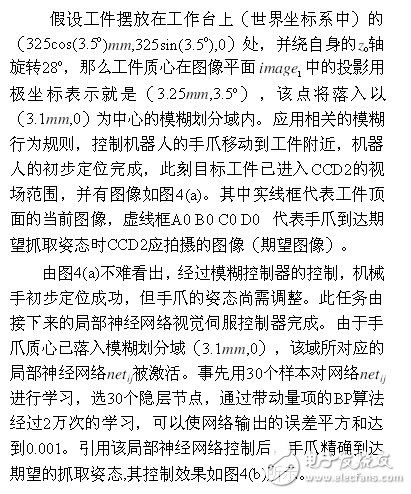
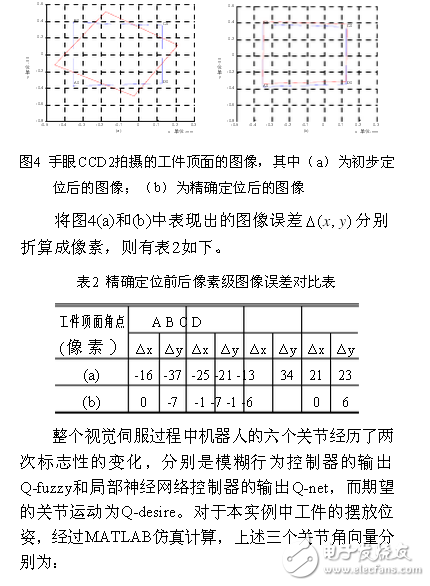
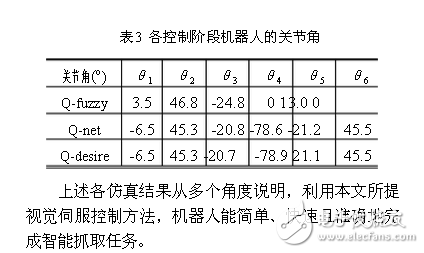
A new robot visual servo control method is proposed. According to the grabbing action of the human, the method firstly uses the fuzzy logic to move the robot's claw to the vicinity of the object according to the position information of the object in the image, and then according to the current image of the object. The difference between the reference images is used to make precise adjustments to the pose of the claws of the local neural network. The whole process does not require the calibration of the robot and the camera, and can effectively utilize the human control experience, the servo speed is fast, and the control precision is high. The simulation results show the effectiveness of the method. Introduction (IntroducTIon) Applying the neural network to the visual servo of the robot eliminates complex camera calibration and matrix inversion operations based on the image Jacobian matrix method. However, the control accuracy and learning speed of the neural network are closely related to the number of learning samples and the complexity of the network structure. It is difficult to universalize the entire robot workspace by a single neural network. For this reason [1] adopts a global BP network and a The local BP network is applicable to the global workspace and the local workspace of the robot respectively to reduce the learning samples and network nodes and improve the learning efficiency of each neural network. [2] The adaptive local neurons are used to approximate the corresponding partial images. Comparable matrix, and a self-organizing map network determines which neuron is activated according to the current position of the robot; [3] uses multiple CMACs to form a hierarchical structure, and the management layer selects an execution layer according to the input parameters to control The robot movement in part of the task space; the text [4] uses a series of local neural networks to approximate the neighborhood of the corresponding teaching trajectory points. The above studies all adopt the idea of ​​hierarchical control. However, due to the inherent defects of neural network learning methods, there are some shortcomings in the design of global networks: on the one hand, the coverage of the global network is large, and the corresponding space for optimization is large, which makes the learning of weights possible. It is trapped in a local minimum, which in turn affects the choice of local neural networks and even the convergence of control errors. On the other hand, some prior knowledge of robot control is not used by network learning. Fuzzy logic can well represent and memorize human experience, thus effectively guiding the operation of robots [5,6]. [5] judges the distance of the target from the hand according to the image features such as the area of ​​the moving target in the hand, and then divides the control of the camera into two stages of proximity and alignment, and uses fuzzy logic and fuzzy neural network to complete the two. Stage control; [6] first decomposes the various operations of the robot into basic behaviors such as proximity, alignment, and grab, and summarizes the corresponding fuzzy control rules for each basic behavior to reduce the number of fuzzy control rules for the entire operation. A behavior-based robotic visual servo control is implemented. In this paper, the robot's intelligent grasping operation is taken as the research background. For the case where the shape of the workpiece and the gripping posture of the gripper are known and the pose of the workpiece is unknown, the fuzzy visual servo controller is used to locate the robotic gripper first, and then the local nerve is used. The position of the network's opponent's claws is precisely adjusted. The whole control process imitates the human operation behavior, the control speed is fast, and the control precision is high. The numerical simulation results of the six-degree-of-freedom robot illustrate the effectiveness of the algorithm. 2 Robotic Visual Servoing Control (Scheme for Robot Visual Servoing Control) 2.1 Structure of Visual Servoing System (Structure of Visual Servoing System) In order to complete the intelligent capture of the workpiece, this paper adopts the system structure shown in Figure 1. The six-degree-of-freedom joint robot can reach any position in three-dimensional space; CCD1 is a digital camera fixedly installed in the work site, which can obtain the position of the workpiece centroid in a large range; CCD2 is mounted on the claw, and the claw The relative position is fixed, and the posture of the workpiece can be observed closely and accurately. 2.2 Fuzzy Behavior in Intelligent Grasp When a person grabs a distant object, he first needs to use the eye to observe the orientation of the object, but then it is not immediately adjusting the posture of the hand and then grasping the object in one step. Live, but first move your hand near the object, adjust the posture of the hand after seeing the exact posture of the object, and finally grasp the object accurately. The same control idea can be applied to the robot's intelligent grabbing operation, making robot control easier. First of all, in the initial positioning of the gripper, since the control of the gripper posture is not involved, it is completely possible to realize only the movement of the three degrees of freedom of the robot (21, θθ and 3θ in Fig. 1), and the control variable The reduction can greatly simplify the design of the controller. Second, many people's control experience can be fully utilized because they completely mimic human actions. For example, in the configuration of Figure 1, the following control strategy can be summarized based on the position of the workpiece in the image taken by the CCD 1 (assuming that it has been adjusted to the same direction as the human vision): If the workpiece is above the image, then the two joints are pressed down or the three joints are raised; If the workpiece is on the left side of the image, then one joint turns left. Obviously, these control rules are described in fuzzy language. This kind of fuzzy servo-based visual servoing method can help the robot to perform general positioning. During this process, the movement of the joints of the robot is clear, reasonable and controllable, thus effectively avoiding the blindness of learning and the unpredictability of the output trajectory in the neural network method. . However, the fuzzy logic based method is not suitable for precise pose control of robotic grippers. Because the precise pose control requires the coordination of the six degrees of freedom of the robot, its control varies with the current position of the joints of the robot, and it is difficult to summarize it by humans. Therefore, this paper selects the visual servo method based on local neural network for the task of intelligent capture. 2.3 Local Neural Network in Intelligent Grasp 2.4 The overall implementation of the system (ImplementaTIon Scheme for the Whole System) The overall implementation of the system is shown in Figure 1. The initial positioning and precise positioning of the split gripper of the entire intelligent gripping operation are carried out in two steps. 2.4.1 Initial Positioning of the Claw (IniTIal PosiTIon of the Grasper) The initial positioning of the gripper is done by a visual servo controller based on fuzzy behavior rules. In view of the limited line of sight of the hand-eye CCD2, the solution first observes the entire workspace scene through a fixed camera CCD1 mounted directly above the robot base. Due to the axis of CCD1 4 Conclusion (Conclusion) In this paper, a new visual servoing method that can summarize the experience of human fuzzy operation is proposed for the intelligent grasping operation of robots. The method divides the grab operation of the robot into two stages: fuzzy preliminary positioning and precise adjustment of the neural network. It has the characteristics of easy control of control, convergence of control error, fast control speed and high control precision. The effectiveness of the proposed method is demonstrated by simulating the intelligent grasping task of the six-degree-of-freedom robot. Automobile And Motorcycle Starting Power Battery Langrui Energy (Shenzhen) Co.,Ltd , https://www.langruibattery.com