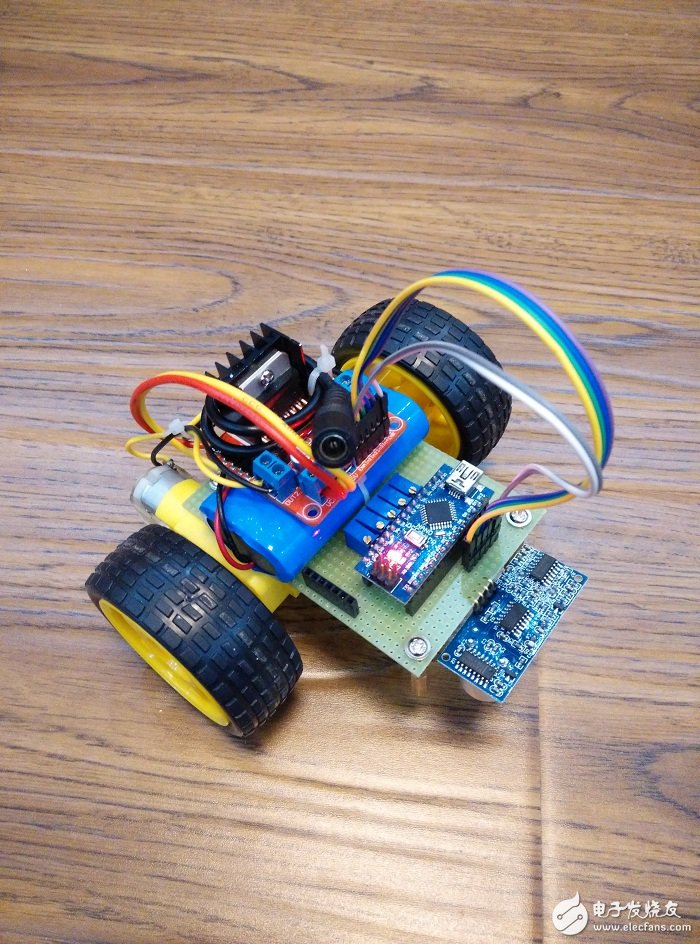
1. Project Overview I saw various posts on the Internet to make self-balancing cars, and I also did it. Because the first time I did it, I didn't have enough money, and I didn't invest too much money. Everything was done according to the minimum configuration, so I chose the "TT motor", commonly known as the "banana motor" car chassis. During the express delivery period, I saw various problems with the use of "banana motor" as a self-balancing car. The biggest problem is the interference of the motor to the sensor and the single-chip microcomputer, and the stability of the balance is not good. . After I finished with Arduino + MPU6050 + L298N as the core, I had nothing to do, I wanted to make a self-balancing car with low cost, easy to use, minimum configuration and most basic functions. The purpose is to give those who have no experience. Newcomers who have just entered the line offer an entry solution. So the goals of this project are as follows: a, low cost; b, the target function is clear, that is, to achieve the self-balancing of the car; c, the system is stable and reliable; d, debugging, easy to operate. 2. Project plan Based on the above objectives, the program uses the ultrasonic ranging module as the detection of the balance state of the car, eliminating the understanding of acceleration and gyro sensors and complex processing algorithms. The balance control of the car still uses the popular Arduino open source hardware on the network, plus the motor drive module L298N, the motor still uses TT motor (banana motor). In order to reduce the cost, the program uses a potentiometer to adjust the balance parameter of the set car, and does not use the Bluetooth wireless module or the wired serial port to adjust the parameters online. The self-balancing trolley realized by ultrasonic ranging method has been proposed on the network that this scheme cannot be balanced on the slope of the slope change. This argument has been solved by my practice. I will carry out this problem later. Explain. The algorithm of balance control still uses the classic PD algorithm in the balance car. Router cables, Bluetooth, Wi Fi and other technologies for wireless connectivity Dongguan Bofan technology Co., LTD , https://www.pengliandz.com