The PI regulator is a linear controller that forms a control deviation according to a given value and an actual output value, and linearly combines the proportional (P) and integral (I) deviations to form a control amount to control the controlled object. Proportional adjustment: proportional to the deviation of the reaction system, once the system has a deviation, the proportional adjustment immediately produces a regulation to reduce the deviation. The proportional effect is large, which can speed up the adjustment and reduce the error, but the excessive proportion makes the stability of the system drop, and even causes the instability of the system. Integral adjustment: The system eliminates the steady-state error and improves the no-difference. Because there is an error, the integral adjustment is performed until there is no difference, the integral adjustment stops, and the integral adjustment outputs a constant value. The strength of the integral action depends on the integral time constant TI. The smaller the TI, the stronger the integral action. On the other hand, when TI is large, the integral action is weak, and adding integral adjustment can reduce the stability of the system and slow the dynamic response. The integral action is often combined with the other two adjustment rules to form a PI regulator or a PID regulator. The input and output of the pi regulator and the threading function are a difficult knowledge. Everyone doesn't know much. Today, I will organize the logic with Xiaobian and revisit this knowledge! Pi regulator PI is just an error controller. The input can be any data. For example, in our elevator, the load weight of a person is a parameter, which will cause the elevator speed to change, and then the elevator speed will slow down. In order to stabilize, it is necessary to collect the elevator. The speed change caused by the load may be the voltage of a sensor, which may be the 16-bit speed data of a sensor output, etc., for PI calculation, the output result is the value of adjusting the elevator speed, which may be the amount of voltage change, maybe It can also be used to adjust the inverter of the elevator motor and so on. k+ ki/s If you theoretically deduct, find a book on control theory; In the case of simulation, the optimization toolbox can be used. Response OptmizaTIon, a menu option for the simulink model can be found. If you are using a PID module, click the Tune button on the module and adjust it manually. PID adjustment, this is more cumbersome to explain, motor vector control has general settings, you can set the parameters according to the general settings. Of course, you can also set it yourself, and the proportional adjustment effect is obvious. You can adjust the speed by changing the KP value. .PID common 诀: Parameter tuning to find the best, from small to large First, the ratio is post-integrated, and finally the differential is added. The curve oscillates frequently, and the proportional disk is enlarged. The curve floats around the big bay, and the proportional disk is small The curve deviates slowly and the integration time decreases. The curve has a long fluctuation period and the integration time is longer. The curve oscillates at a fast frequency, first lowering the differential The momentum is large and the fluctuations are slow. Derivative time should be lengthened Ideal curve two waves, front high and low 4 to 1 A look at the second adjustment and multi-analysis, the adjustment quality will not be low 2. The engineering setting of PID controller parameters, the empirical data of PID parameters in various adjustment systems can be referred to below: Temperature T: P=20~60%, T=180~600s, D=3-180s Pressure P: P=30~70%, T=24~180s, Liquid level L: P=20~80%, T=60~300s, Flow rate L: P=40~100%, T=6~60s.
Dc gear motor, namely gear reduction motor, is based on ordinary Dc Motor, coupled with gear reduction gearbox.
The gear reducer is used to provide low speed and large torque.
At the same time, the gearbox with different deceleration ratio can provide different speed and torque.
Generally different industries, using different power dc motor, generally adopt custom parameter design pattern.
What are the four ratings of the Dc Gear Motor? The DC gear motor is often seen in our industrial production. Here Shunchang Motor gives you the knowledge of its four ratings. To talk about
precision instruments and meters,automobile industry, medical equipment, consumer electronics, household appliances, electric glass doors and Windows,etc., wide application range
Features: gear motor drive precision, small volume, large torque, low noise, durability, low energy consumption, customized power design,easy installation, easy maintenance;Simplify design and save space.
Method of use: the best stable in horizontal plane, installed on the dc gear motor output shaft parts, cannot use a hammer to knock,knock prone to press into the dc gear motor drive, may cause damage to internal components, and cannot be used in the case of blocked.
Operating temperature range:
Geared motors should be used at a temperature of -10~60℃.
The figures stated in the catalog specifications are based on use at ordinary room temperature catalog specifications re based on use at ordinary room temperature (approximately20~25℃.
If a geared motor is used outside the prescribed temperature range,the grease on the gearhead area will become unable to function normally and the motor will become unable to start.Depending on the temperature conditions ,it may be possible to deal with them by changing the grease of the motor's parts.Please feel free to consult with us about this.
Storage temperature range:
Geared motors should be stored ta a temperature of -15~65℃.
In case of storage outside this range,the grease on the gearhead area will become unable to function normally and the motor will become unable to start.
Service life:
â—Use with a load that exceeds the rated torque
â—Frequent starting
â—Momentary reversals of turning direction
â—Impact loads
â—Long-term continuous operation
â—Forced turning using the output shaft
â—Use in which the permitted overhang load or the permitted thrust load is exceeded
â—A pulse drive ,e.g.,a short break,counter electromotive force,PWM control
â—Use of a voltage that is nonstandard as regards the rated voltage
â—Use outside the prescribed temperature or relative-humidity range,or in a special environment.
â—Please consult with us about these or any other conditions of use that may apply,so that we can be sure that you select the most appropriate model.
when it come to volume production,we're a major player as well .each month,we rurn out 600000 units,all of which are compliant with the rohs directive.Have any questions or special needed, please contact us, we have the engineer group and best sales department to service to you Looking forward to your inquiry. Welcome to our factory.
Gear Motor,Micro Gear Motor,Small Gear Motor,Bike Lock Gear Motor Shenzhen Shunchang Motor Co., LTD. , https://www.scgearmotor.com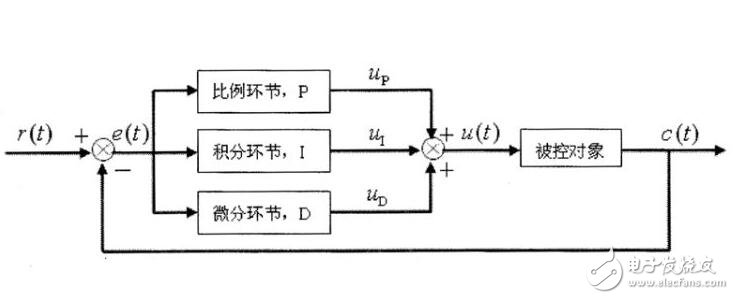
1. Rated Current: The rated current is the maximum current allowed to flow through the armature winding of the DC deceleration motor in accordance with the specified operating mode, in A.
2. Rated Voltage: The rated voltage is the maximum additional voltage that the armature winding of the motor can work safely, unit V. It
3. Rated Speed: Rated speed refers to the rotational speed of the Gear Reducer Motor in the rated voltage, rated current and output rated power under the circumstances of operation, the unit is r/min. Such
4, rated power: rated power refers to the motor in accordance with the specified mode of operation can provide output power. For motor, rated power is the output of mechanical power on the shaft.





