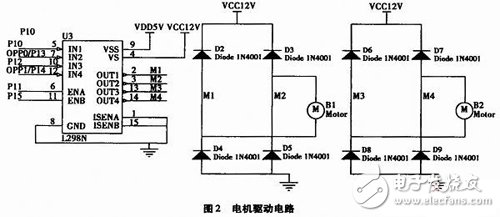
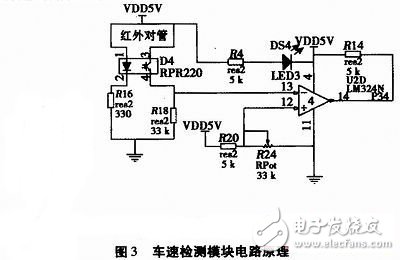
At present, many higher education institutions use educational robots to teach and train students' innovative abilities. The educational robot designed in this paper detects the road surface information through the infrared photoelectric sensor array and uses the fuzzy self-tuning PID algorithm to process the collected road surface information and the motor running data in real time to realize the intelligent cruising of the educational robot and display the output status of the robot. Motor drive circuit design The DC motor used in this system is rated at 12 V and rated at 300 rpm. The motor drive circuit uses a dedicated chip L298N as the motor drive chip. The chip is used as a motor drive, which not only has good stability, but also greatly simplifies the drive circuit, and has a large driving capability, which is favorable for the stability of the motor speed. The motor drive circuit is shown in Figure 2. Vehicle speed detection module circuit design The educational robot system reads the current vehicle speed through the vehicle speed detection module. The method adopted is to respectively paste a code disk uniformly distributed with black and white stripes on the rear left and right wheels, and use the picture detection circuit to detect the black and white stripes on the code disk. When the wheel rotates, the intensity of the reflected light received by the infrared receiving tube changes to generate a pulse signal corresponding to the wheel speed, and the pulse signal is amplified and shaped, and then input to the pins P3.4 and P3.5 of the single chip microcomputer. By recording the number of pulses obtained per unit time, it is possible to express the speed of the left and right wheels of the current car, and at the same time, the distance traveled by the trolley can be calculated by accumulating. This paper mainly introduces the design of educational robot with STC12C5A60S2 single chip as the core, and expounds the hardware circuit design, software module and control algorithm design of educational robot. The infrared photodetection array and fuzzy self-tuning PID controller designed by the system make the educational robot more stable while walking, and the control method is simple and practical. The system can be used in areas such as unmanned driving, automatic detection and other artificial intelligence. Best Window Cleaner,Upvc Cleaner,Best Glass Cleaner,Outdoor Window Cleaner Ningbo Multitasking Electronic Co.,Ltd , https://www.smartmultesic.com