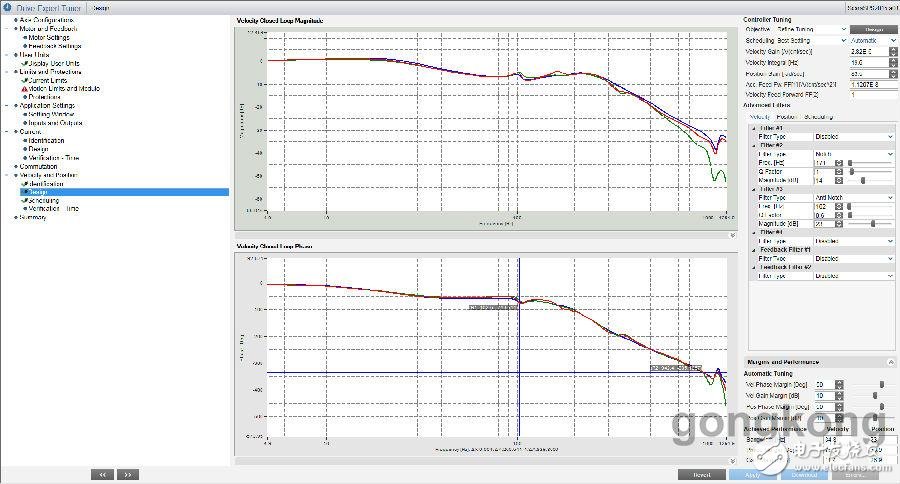
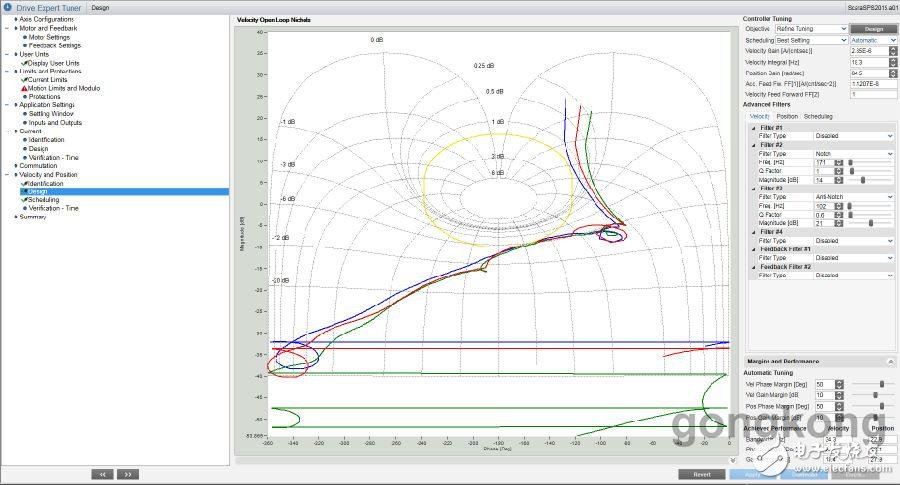
Zhongke Xinsong Co., Ltd. integrated Elmo's ultimate multi-axis motion control solution in the design and development of the first generation of collaborative robots The Chinese robotics company "Sinsong" fully adopts Elmo's ultimate motion control solution as the latest design of the first generation of collaborative robots, which solves many challenges encountered in the development of new generation products. Imagine a robot that perfectly simulates the movements of a Tai Chi master, the movements are precise, smooth, and full of force. Consider the importance of an integrated collaborative robot cooperating with human employees in a real factory. Such collaboration must also meet strict and mandatory safety constraints. Using Elmo's unique and advanced servo drive technology, this leading company in the field of robotics and automation in China has just completed the independent research and development of the first generation of man-machine collaboration factory automation robots. Elmo provides ultra-small, powerful network-based servo drives, which are directly mounted on the joints. This application reflects the unique advantages of Elmo drives in many aspects, such as efficiency, sturdiness, space saving, minimum cable usage, low EMI index and the improvement of the overall system reliability. When designing and manufacturing complex 7-axis collaborative robots, the use of dual closed-loop control and the use of high-resolution absolute encoders to obtain optimal servo performance are just some of the challenges. Elmo's application examples in the field of high-end robotics can be used as a guiding reference for customers when pursuing the highest multi-axis motion control performance in the research and development process. Collaborative robots are designed to work closely with people on factory production lines, and this trend is becoming more and more common. In a human-machine collaboration environment, these robots are used to complete high-speed, high-precision tasks. Using cameras, force sensors and other sensing elements, these robots can sense the presence of people and make corresponding actions to avoid harm to people. Sometimes the robot's actions will stop completely. Collaborative robots are usually designed to flexibly handle small parts and perform auxiliary tasks such as installing consumer electronics, rather than to complete heavy-duty tasks such as carrying heavy objects, welding or painting. The structure of a typical collaborative robot is relatively small and light, but it is still capable of lifting a relatively heavy load, up to 100kg. In addition to the features of dexterity, collaborative robots also need to have the ability to perceive whether parts are accurately installed, which is unimaginable in previous generations of heavy industrial robots. The old-generation traditional 6-joint robots have relatively large torque when moving their joints, which can easily cause injuries to people approaching. The new generation of robots has an additional joint or degree of freedom. Compared with the traditional 6-joint robot, the 7-joint robot can extend the manipulator arm at multiple angles to approach a specific original, so it can avoid touching people and continue to perform work tasks. In addition, kinematic redundancy is also useful for operating several robots in a specific space, because motion interference is easy to handle. Another additional feature of collaborative robots is that they can sense, control and limit torque. The robot senses the smallest external torque changes and reacts to avoid collisions. In some cases, the torque sensor is placed behind the motor gearbox to directly detect any rapidly increasing changes in the external torque, while other times, the robot needs to output a certain torque to lift the load and move the load from one position to another. . When the robot recognizes an abnormal torque increase during movement, such as a collision, it will automatically stop. Another feature of the collision detection and avoidance mechanism is to switch the working mode when it touches an object or person, from the inflexible full speed mode (cyclic synchronous position mode or cyclic synchronous speed mode) to torque mode (cyclic synchronous torque mode). The compliant cyclic torque mode allows personnel to easily push away the robotic arm with their hands. The robot can automatically enter the compliant mode when touching an object, or run in full speed mode. Another important mode is the teaching mode. In this mode, the operator moves the robotic arm to a predetermined position, and the Elmo controller records these positions to reproduce the set trajectory in the normal operation mode. It is worth mentioning that during the teaching process, Elmo's solution provided incredible sensitivity and resolution. The teaching process is simple, the system operator does not need to have super programming ability, and truly realize the realization of non-programming motion control. Elmo's ultra-small, powerful servo drives were used to complete this challenging task. The servo driver is directly installed on the robot joints, which ensures that the robot is small in size and compact in structure. Two high-power ultra-small drivers, Gold SOLO GUITAR, are used to drive two basic joint motors to support the operation of the entire mechanical structure. The continuous 50Amp and peak 100Amp current output capability of this driver is enough to drive the motor to run at high speed, high acceleration and high deceleration. In addition, five mini-type Gold SOLO WHISTLE drivers can output continuous 20Amp and peak 40Amp currents to drive another five joints. Each drive in the system can run at high speed, high acceleration and deceleration, and at low speed, and can guarantee extremely high precision and accuracy. Using the same driver to achieve such a huge contrast between high and low speed operation is due to the driver's 1:2000 dynamic current range and very wide bandwidth response. The physical size of a drive is small enough to be directly mounted on the robot joint, and it is almost the only choice for this kind of complex robot project. Placing the driver close enough to the encoder feedback can save cables, reduce interference effects, obtain relatively low EMI and RFI indicators, and greatly improve system stability. Another feature that makes the drive easier to integrate into the joint is the inherent sturdiness of the drive, which can withstand the extremely high mechanical acceleration and deceleration in the joint. Elmo's advanced and easy-to-use configuration tool, EASII software, can help customers debug each axis in the network to achieve optimal servo performance. System identification, appropriate controller design, and the use of high-order filters to overcome mechanical system defects can improve the system to obtain optimal servo performance, which are only part of the functions of this tool. In addition, the use of simple and advanced system identification methods with special position grouping gains for multi-axis system identification can eliminate cross-effects between different axes. In this application, more other unique functions are used. The ultimate goal is to obtain the highest bandwidth and fastest response time, while ensuring that the robot runs stably, smoothly, and has a high margin. Each axis in the system adopts a double closed-loop control algorithm to improve the positioning accuracy of the joint end position of the rear end of the reducer. Incremental encoders and Hall components are placed at the front of the gearbox as speed loop feedback, and 19-bit high-resolution absolute encoders are used as load end position feedback. This usage is only a standard usage of Elmo gold wire series drives. The double closed-loop control algorithm can improve the performance of the servo motor to the optimal state. Elmo provides PCB pin-mounted drivers, and can also provide an interface adapter board at the same time, which allows customers to connect EtherCAT bus, IO and encoder feedback through the adapter board. Controlling the entire system is Elmo's advanced multi-axis motion controller P-MAS, which synchronizes 16 axes within 250us through a real-time serial EtherCAT bus (the shortest can be synchronized with 8 axes within 100us). Elmo's advanced multi-axis motion controller P-MAS can provide rich robot kinematics functions, such as Cartesian, SCARA, 3-Link, Delta, etc., using these functions can easily meet the challenges of robot applications. The built-in kinematics function supports MCS (Machine Coordinate System) and PCS (Product Coordinate System), which can be fully synchronized in flip, transmission and other external devices. In addition, P-MAS reserves a real-time kernel for customer applications. This part of the core allows robot developers to write their own special kinematics conversion equations. This function enables P-MAS to support any high-end robots, almost unlimited in type, because customers can write their own kinematics functions for applications. For this kind of application that completes the forward and inverse solution calculation of robot kinematics within 250us bus cycle time, the multi-axis motion controller P-MAS based on a powerful quad-core processor must be used. The kinematics equation solving is carried out in the user's real-time application. The target position, target speed or torque of all axes in the system are calculated and output in each EtherCAT bus cycle. The cyclic synchronization mode in the DS-402 protocol is the built-in standard operating mode of Elmo's EtherCAT version drive. Multiple standards and specialized communication protocols between P-MAS and the host computer, PLC or HMI make it very easy for P-MAS to communicate with third-party devices, such as touch screens, hand-operated panels, PLCs and PCs. The communication capability with the upper host computer such as Ethernet, TCP/IP and UDP protocols, and the fast binary protocol such as MODBUS and Ethernet/IP, make the communication with the upper host computer fast and effective. The robot works in two modes, the first is the teaching mode, and the second is the working mode. In the teaching mode, the operator can move the robot arm to some key positions along the required work path. During the movement, the multi-axis motion controller records the relevant position points to reproduce the work path in the work mode. In the teaching mode, the servo drive is running in the synchronous cycle torque mode. In addition to the target torque command, the multi-axis motion controller will also output additional compensation torque to overcome resistance factors such as gravity and robot dynamics to maintain a smooth drag process. One of the highlights of this complex robot solution is that the entire teaching process is very simple for an operator who does not know how to program, and most of the work can be done without programming experience or skills. The second operation mode is the normal operation mode. In this mode, the multi-axis controller calculates the target position and speed of the seven axes (the inverse solution of the DH matrix) according to the kinematics model of the robot, if necessary, based on the robot dynamics The compensation torque of the model will be added to the total output torque. The servo drive is working in cyclic synchronous position mode or cyclic synchronous speed mode, and receives target position/speed commands and torque bias commands. • Unmatched servo drive performance • It can achieve complete synchronization and coordinate movement of 16 axes within 250us •Small size, high power servo driver is directly installed on the joint • Large dynamic current range suitable for high speed and high precision • Double closed loop control performance • Support a variety of feedback (incremental encoder and absolute encoder) • Use a powerful multi-axis controller to achieve synchronization and robot kinematics calculations • Fast, real-time EtherCAT bus network • Optimal servo drive performance—high bandwidth brings fast response time • The powerful EASII software makes the configuration and implementation of the robot easy • The highest efficiency and ultimate stability • Rugged and durable, the drive can be installed in any position • Very low RFI EMI and RFI index For Zhongke Xinsong Co., Ltd.'s latest generation of technology product collaborative robots, Elmo's intelligent, small size and easy-to-use servo and motion control solutions have greatly improved the performance of its products and enhanced the functionality of the products. 60V Battery Pack ,Battery Pack With Outlet,Back Up Battery Pack,Ev Battery Pack Zhejiang Casnovo Materials Co., Ltd. , https://www.casnovonewenergy.com