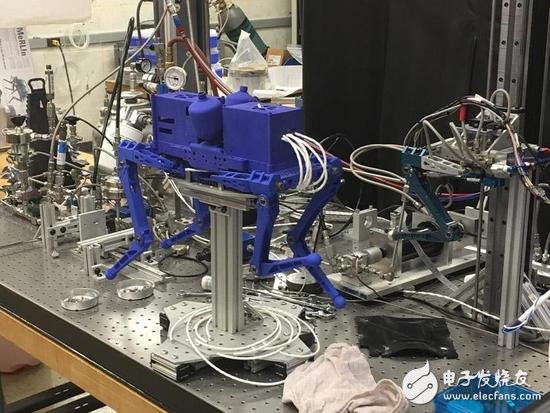
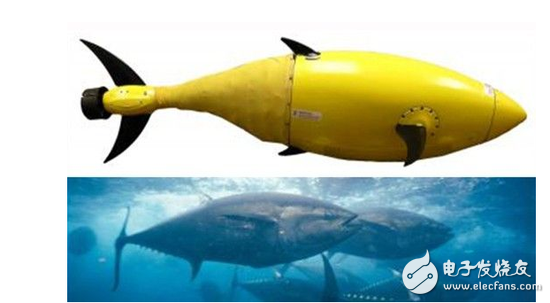
Electronic enthusiasts eight o'clock: April 27 news, according to PCMag.com reports, in nature, elegant engineering solutions abound, and experts in the field of robotics are trying to unlock their secrets. It took me more than five minutes for the guards to pass through the reconstruction of the warehouses during World War II, first through the labyrinth of dark corridors and spongy orbital cabins, and then through the lab full of spacecraft skeletons, and finally Only arrived at the workbench, where the US Navy is building robotic squirrels. The full name of this robotic squirrel is the Mescale In Motion Program (MeRLIn), which can be considered a rodent monster. By the time this spring is completed, the robot weighs about 9 pounds to 20 pounds. The MeRLIn consists of a rectangular tube and a tenth-generation dog joint leg that is then mounted on a sliding aluminum post. The dark blue 3D printing module next to it shows its status at completion: a four-legged, headless machine that is the same size as the Yorkshire Terrier. But when the project's engineers started it for a demo, I saw why they liked to make MeRLIn a squirrel. Although it uses a small motor and a hydraulically driven piston, it can jump very high. MeRLIn is just one of the robots that have recently been inspired by animals. The animal kingdom is full of clever inspirational and athletic illustrations, and efficiency is the key in a battery-driven, limited-powered robotic world. For example, mimicking the kangaroo's ability to jump can help the robot achieve an ideal balance between power consumption and performance: each step of the marsupials provides a powerful storage energy for the hind legs, allowing the kangaroo to travel long distances with less energy consumption. travel. Today, with the emergence of the most innovative robot designs, biology has provided tremendous support. Take a look at Salto at the University of California at Berkeley, which draws inspiration from African high jump monkeys. The mantabot of the University of Virginia was developed in response to the Chesapeake Bay bull nose. It's easy to understand why. The inspiration gained from living things has significant advantages in design, especially when it comes to tasks that are difficult for humans to adapt and complete. From tiny flies to deep-sea fish and even microbes (some fuel cells are driven by microbial chemistry), nature is modifying and adapting organisms in a very efficient way so that they adapt to various environments. Millions of years of evolution have allowed animals to fly, jump, walk, and swim, and perceive in the invisible spectrum. In addition, they have more capabilities that we may not have discovered so far. But the biological robots that are being built today are far from mechanical reproductions of animals, and they are the direction in which these elegant biological solutions evolve. Now we need to parse these biological strategies and break down their main essence to use them to achieve our goals. Scientists and engineers build these better-moving components, processors that can be thought-provoking, and sensors that can be accurately detected, and then integrate them into a truly useful solution that can be done in batches with difficult tasks. If MeRLIn seems to be familiar, it does. The project's chief investigator, Glen Henshaw, said that in fact, MeRLIn was inspired by other well-known Internet robots such as Boston Dynamics' L3, Big Dog and MIT's Cheetah. Engineers at the Naval Research Laboratory hope to develop smaller, quieter, and more dexterous robots that don't require two young, burly Marines to carry it to check for potential hazards. But developing MeRLIn is not simply to shrink the robot so that it can fit into the soldier's backpack. It also has a process to understand the specific gait function, why these gaits fit into different terrains, and how to make robots that can learn to adapt and choose the correct gait. On MeRLIn's workbench, control engineer Joe Hays enters several test commands into the computer, causing the robot's legs to twitch and pull. After he removed the supporting aluminum column, MeRLIn's single leg could support the brick-sized body. Control was then handed over to the hydraulic control system, and with lightning bolts, merRLin's legs bounced into the air at 1 meter and were then redirected back into the vertical metal track. Repeating this process 3 times, the robot hit the top of the shield after the last powerful jump, then fell heavily on the ground and the leg broke. Henshaw said: "Frankly, there are many ways of animal movement that we don't know. We really don't understand the neuromuscular system. We are trying to build something that doesn't know how to walk." The team is also studying some of the problems in hydraulics, but using adaptive algorithms has found a good success model that detects and corrects uncertainties in hardware circuits at a rate of one time per millisecond. They believe that it is expected to jump from the ground to the table within a few months. At the University of Pennsylvania, under the direction of Dan Koditschek, Avik De and Gavin Kenneally designed the Minitaur to be the latest ultra-small Lightweight quadruped robot. The Minitaur weighs about 6 kg and can jump forward. But when you see it crawling stairs, flipping walls and jumping to unlock the video, love can quickly become suspicious. De and Kenny Lee drastically cut the body of the robot by using free-swinging, directly-driven legs instead of traditional gears to drive the legs. The motor is connected as a feedback sensor to the robot's software to detect and adjust torque, which can be performed 1000 times per second. As a result, the robot can jump slowly, quickly, climb stairs, jump up, swing the legs, and then hook the door handle to open it. Although it is far from automated and lacks sensors and control systems that allow it to move freely, Minitaur's unique, adjustable spring-high-pitched action shows flexibility even without a powerful drive mechanism. It is assembled from parts purchased on the market. De said: "Obviously there are enough motives for these people to install the legs, but the current state of the art is not mature enough and very expensive." De also apparently refers to the Boston Dynamics Atlas robot, although its ability is more powerful, but expensive. The technology is complex and difficult to imitate. He said: "We want to make robots that other people can use, so that they can try in their own applications." Howie Choset admits that he is afraid of snakes. Surprisingly, however, his most famous works are almost serpentine. Josette is an associate professor at Carnegie Mellon University. He has been studying snake-shaped robots since he started studying for graduate students and has achieved a series of achievements. He is responsible for the Robotics Institute at Carnegie Mellon University, where many of the creative features being developed are inspired by snakes. He is also the editor-in-chief of the recently launched Journal of Science RoboTIcs and has written a textbook on the principles of robotic motion. In the meantime, José also founded two companies, Hebi RoboTIcs and MedroboTIcs. Among them, the latter mainly researched the advanced endoscopic surgical tool Flex RoboTIc System, which has been approved by the FDA in 2015. Joséd argued that the Flex Robotic System was inspired by snakes. He said that the snake's serpentine is based on the twists and turns of the human inner space. But other people's recent work is obviously to develop robots by observing snakes and mimicking their actions, especially by working with Georgia Tech physicist Dan Goldman, who mainly studies biomechanics. Inspired by robots from crabs, turtles, crickets, shellfish and sand fish. Josette also admitted that his research was influenced by Robert Full, one of the pioneers of bionic robots, who was the head of the Poly-Pedal lab at the University of California at Berkeley. By studying how 移动 moves, how the gecko climbs into the vertical wall, Forre, Josétte, and other experts manage to classify these secrets into general design principles that can be applied to new robot designs. Josette said: "Should we copy biology? No, we need to ask biologists, we want the best design principles and put them into practice." Josette, Goldman, and Jose Atlanta's Joseph Mendelson studied the way the rattlesnake moved, and eventually summarized its violent twisting motion into a series of deformation waves. Applying this knowledge to the Serpentine Robot project, Josette's team was able to get their robots to climb the sand, a task that was previously impossible. Understanding how snakes change shape to suit their surroundings also allows Joséte to develop a new serpentine robot that wraps around the column and inside the sill. He envisions that the design could be used to explore very dangerous internal conditions, such as nuclear power plants or Inaccessible archaeological sites. Joséte said: "In fact, the biology is so complicated, I only hope to apply its mechanism to our robots. But we are not copying the capabilities and complexity of animals, we hope to build greater development. The mechanisms and systems of potential.†Josette’s own progress and the achievements and discoveries of the students were applied quite occasionally to the field of development into robotics. He said: "Evolution is blind, there is no turning point, only a series of developments. From the outside, they are like a major breakthrough." Many times, engineers don't understand biological principles, which requires engineers and biologists to collaborate. At the University of Chicago, biologist Mark Westneat is working on the squid and working with the Navy to develop a slow but flexible robot WANDA that can be used for underwater movements. Help check hulls, docks and oil drilling. High-speed photography was an important research topic more than 20 years ago. At the time, Westernett had just begun research on the image of the head fish, and the Navy was interested in his research since then. In a constant current flow cell, Westernet calls it a "fish treadmill", where the thunder fish swims happily and can only be held in a fixed position in the flow cell using the pectoral fin, while the high speed The camera captures every detail of its motion at speeds of up to 1000 frames per second. Combining biologists' detailed knowledge of the anatomy of the head fish, such as how the fins are attached to the muscles, how the nerve endings in the fins transmit stress and tension, etc. These photography can help scientists understand how the wrasse fish pass through Twist the body in the water and tap the water to push yourself. This ability allows the head fish to stay in place and the body is not washed away by the water. Jason Geder, chief engineer of the WANDA project, said this capability makes the squid an ideal model for new flexible underwater equipment. “The traditional propeller- or booster-driven underwater equipment does not have this operability, or the turn is too large,†he explained. “The squid is a very good fish model because if we want to be in the underwater equipment center With a rigid outer casing, we can use this pectoral fin movement to achieve similar performance." Westernet believes that the new 3D photography capabilities can further strengthen research. He said: "For fish, this is a matter of survival or death. For us, a better understanding of efficiency means we will get better motivation. We really want to imitate the bone structure of the underlying film and Mechanical performance, see if we can get super high efficiency." For researchers, the museum's bio-collection is another rich resource that has not been fully utilized. Take the Smithsonian Museum as an example. There are nearly 600,000 species of vertebrate animals. And Rolf Müller of Virginia Tech is taking advantage of this, he got inspiration from bats to develop drones. Using 3D scanning of bat ears and nose in the museum, Muller has created a flying robot of similar structure. He said: "There are millions of samples collected in the drawers there, and you can quickly access them." He invited museum professionals and researchers to help promote similar bionic studies across the country. Whether it's fish in a flow cell or a sample lying in a drawer, it's still a challenge to turn them from data to useful forms. Westinte said: "Typical engineers need specifications, but biologists may give them anatomical maps." Until personally started some engineering meetings, Westernet realized that his work could provide fish. Mechanical data of motion that can be converted into motor power, power, and data that engineers use to develop better machines. He said: "These are natural choices, but they can also make automatic vehicles different." There are challenges in learning, memory, and adoption. Let's go back to the Navy's retrofit warehouse, and the MeRLIn team is still working on miniaturization. But they all realize that the robots they envision are not complete without learning, memory, and adaptability. When Henshaw is not working in the laboratory, he will raise sheep at home. He said that observing the new born lamb toddler also emphasized the difficulty of manually replicating the process. He said that no one really understands this process, and lambs need to constantly adjust their movements so that they can adapt quickly to changes in the body as they grow. His team is using this strategy to write software that will allow them to change the gait of MeRLIn. In addition, Henshaw is also participating in other projects to help develop biology-derived learning systems. He showed the video, showing the process of kicking the ball into the goal. After 3 programming sessions, the leg can automatically play 78 times, it can systematically select its own target and track its success and failure. After further refinement and application to robots such as MeRLIn, this type of code may make it easier for the walking robot to adapt to its different payload or leg length. “Many projects have their own equations to help find solutions that optimize gravity center or motion through real-time large mathematical equations. This method is useful, but it is not entirely biological,†says Henshaw. “I can’t say that The algorithm written by the kicking robot is happening in the brain, but it seems to be something that must be done. Humans learn to climb trees and the earth through practice, not numerical optimization." But Henshaw added that the knowledge gathered by deep learning and access is likely to speed up the process, but the hardware is not strong enough or still small, and there is no suitable thing to adapt to the miniaturized MeRLIn. He said: "If you want these small robots, then we don't have to make much improvements to the algorithm, but we try to develop the hardware that runs them. Otherwise, you will find that the computer and battery are too big, and the small robot is not efficient at all. jobs." The shortcuts provided by bio-innovative body platforms and sports strategies may also help make robots that borrow inspiration from living things more economically viable. Joséte is not the only scholar who created a company to promote the practical application of his invention. In fact, Eelume, funded by Kristin Ytterstad Pettersen, a professor of robotics at the Norwegian University of Science and Technology, is currently marketing his own robotic swimming. Snakes for underwater exploration and inspection missions. Ghost Robotics, founded by De and Kennelly, is also selling Minitaur. Large private companies are also participating in this field. Boston Engineering's ship inspection robot BioSwimmer has entered the final live demonstration phase. Not only is this robot inspired by the tuna, its entire outer body is based on a 1.5-meter-long bluefin tuna that was captured by the company near Waltham's office. Like tuna, the BioSwimmer thruster comes from the rear, allowing the front half of the robot to be fitted with various sensors and payloads. Their goal is not to imitate tuna, but to take advantage of the efficiency and performance of this animal. Mike Rufo, head of Boston Engineering's Advanced Systems team, said that the biological aspects of design are not as easy to create, but it does not add extra difficulty. Luf announced that the company is building BioSwimmer (1.5 meters long, 45 kilograms), the cost of a similar project is about $1 million, and the cost of the BioSwimmer is only similar to that of a similar body. But the inspiration comes from the sporting efficiency provided by the tuna propulsion strategy that allows it to run longer when using a standard power source. Luf said: "Overall, there are many technical obstacles in the way we build bionic robots, but biological inspiration also provides opportunities for us to solve those direct challenges or to some extent mitigate them. The impact and performance. For example, despite the exciting advances in battery technology, how much power can you inject into small robots on our platform? If you can solve system efficiency problems, Perhaps the impact of the battery will not be too great. In this regard, biological inspiration can play a huge role." However, Luf believes that such robots are not common, in addition to defense applications, it will take at least 5 to 10 years to become popular. We still have to overcome many obstacles before we have a less creepy robotic assistant in our daily lives. In the past few years, great progress has been made in this field, and the combination of biology and evolution has become increasingly clear. We are more concerned with the strong adaptability and execution capabilities of biology. Westnett said: "Sometimes, I look at these underwater robots, they still seem clumsy, but that's because I am used to seeing elegant animals through coral reefs. I think engineers and biologists can join forces. It’s getting less and less surprising to research robots so that they can jump into the water to perform their tasks. Everything that happens in this area is exciting!†(Little) Disclaimer: The electronic reprinted works of E-Commerce Network are as far as possible to indicate the source, and all rights of the owner of the work are not transferred due to the reprint of this site. If the author does not agree to reprint, please inform the site to delete or correct it. Reprinted works may be subject to change in title or content. High temperature thermocouple slip ring with German and Japanese imports of key materials, can be used in high temperature environment rotate 360 degrees to transmit current and thermocouple signal, can be long-term stability in 100 ~ 250 ℃ high temperature environment, it is mainly used for hot roller, the high temperature environment, such as heating device, suffered long-term complex field practice test, transmission performance is stable and the quality. High Temperature Slip Ring,Taidacent Slip Ring,Slip Ring Capsule,Fiber Brush Slip Ring Dongguan Oubaibo Technology Co., Ltd. , https://www.sliprob.com