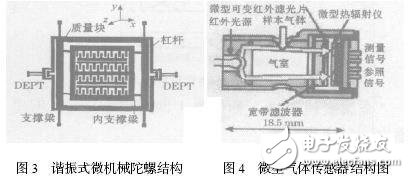
Compared with traditional sensors, micro-sensors have many new features, which can make up for the shortcomings of traditional sensors, have broad application prospects, and are getting more and more attention. The structure and principle of some micro-sensors are introduced in detail, and the basic performance characteristics of micro-sensors and the development trend of micro-sensors are illustrated. Conventional sensor devices are incompatible with semiconductor IC processes because of their fabrication process, so they cannot be matched to high-speed, high-density, small-volume, and low-cost signal processing devices fabricated by IC technology in terms of performance, size, and cost. This restricts the integration, batching and performance of the entire system. Micro-sensors are not the product of simple physical shrinkage of traditional sensors, but a new generation of sensor parts prepared by MEMS processing technology with new working mechanism and materialization effect, using standard semiconductor process-compatible materials, with miniaturization and integration. Can greatly improve sensor performance. The signal can be amplified before the signal transmission, thereby reducing interference and transmission noise, improving the signal-to-noise ratio; integrating the feedback line and the compensation line on the chip, can improve the linearity and frequency response characteristics of the output, reduce errors, and improve sensitivity. It has an array. Sensitive components, amplifier circuits, and compensation lines can be integrated on a single chip. Multiple identical sensitive components can be integrated on the same chip; it has good compatibility and is easy to integrate and package with microelectronic devices. It can be mass-produced by the mature silicon micro-semiconductor process and the cost is very low. Micromechanical acceleration sensor It is one of the first miniature sensors to be successfully developed and widely used in MEMS technology. The main working modes of the micro-acceleration sensor are piezoresistive, capacitive, force-balanced and resonant, and now there are micro-mechanical thermal convection accelerometers. Figure 1 and Figure 2 show the principle and structure of the new acceleration sensor. There is a diffusion heating resistor at the end of the cantilever beam, and the heat generated by the heating resistor is transmitted along the beam and the upper and lower heat dissipation plates. The rate at which heat is transferred to the upper and lower heat sinks depends on the distance between the heating resistor and the heat sink. The temperature profile along the cantilever beam is determined by the relative position between the cantilever beam and the heat sink. Acceleration can be measured by measuring the cantilever beam temperature by a P-type silicon/aluminum thermocouple distributed on the cantilever beam to determine the relative position of the cantilever beam to the two heat sinks. The sensor's thermocouple has high sensitivity and can directly output voltage signals, eliminating the need for complex signal processing circuits and being insensitive to electromagnetic interference. When the distance between the cantilever beam and the heat sink is 140μm and 200μm, the beam length is 100μm, the beam width is 4μm, and the beam thickness is 10μm, the sensitivity of the sensor is 1 mV/g, the measurement range is 25g, and the resolution is 0.003 g. There is no large mass in the structure, and the micromechanical thermal convection acceleration sensor has strong impact resistance, but its frequency response range is narrow. Micromachined angular velocity sensor For the detection of the angular velocity of rotation and the angle of rotation, a gyroscope is required. Micro-mechanical gyros based on MEMS technology can be widely used in automobile traction control systems, medical equipment, military equipment, etc. due to their low cost and mass production. The micromechanical gyro has a double gimbal structure, a cantilever beam structure, a tuning fork structure, etc., and its working principle is based on the Coriolis effect. The structure of the resonant micromechanical gyroscope is shown in Figure 3: it consists of a stationary drive fixed to the base, a mass (including the internal moving tooth frame and the outer frame) and two double-ended tuning fork resonators (DETF). The mass is fixed to the substrate by 4 support beams. When a driving voltage (angular frequency ωp) is applied to the stationary driver, the internal movable tooth frame of the mass moves in an oscillating motion along the y-axis direction. If an external rotation about the z-axis (input signal Ω) is applied to the chip, the mass produces a Coriolis force along the x-axis and is transferred to the outer frame by the inner support beam, which is fixed by two pairs of support beams It can be moved in the x-axis direction and is amplified by two pairs of levers and transmitted to two double-ended tuning fork resonators (DETF) on either side of the outer frame. The change in the output signal frequency on the DETF reflects the change in the input angular rate. The outer surface profile of the micromachined gyroscope has a structural parameter of 1 mm2 and a thickness of only 2 μm. The vibration wheel type silicon micromachined gyroscope given in the literature has a diameter of 1 mm, a thickness of 19 μm, a width of 5 μm, and an electrode spacing of 7 μm. Micro gas sensor The miniature gas sensor can be divided into a silicon based gas sensor and a silicon micro gas sensor. The former is based on silicon and the sensitive layer is non-silicon material, which is the mainstream of current micro gas sensors. The sensitivity of the gas sensor is highly dependent on the operating temperature and requires the sensor system itself to have heating elements and temperature sensing elements. The MEMS-based micro gas sensor is highly integrated, and it is easy to integrate the gas sensor and the temperature detecting element to ensure the performance of the gas sensor. Figure 4 is a schematic diagram of the structure of a carbon dioxide gas sensor with a volume of only 1 cm2. The working mechanism of the gas sensor is based on the principle of non-scattering infrared double beam and dual wavelength measurement. Its structure consists of a conventional small infrared source, a gas chamber and an infrared detection unit. The infrared detection unit is composed of two single crystal silicon micro-radiometers, a broadband filter and a micro-variable infrared filter. The reference signal source can compensate for the influence of the attenuation of the measurement signal caused by the pollution of the light source. In the sample gas with a carbon dioxide volume fraction of 2000 & TImes; 10 - 6, the sensor has a resolution of 20 & TImes; 10 - 6 (1σ) with a time constant of 3 s. Plano Concave and Bi-Convex/concave Cylindrical Lens
Plano-concave Cylindrical Lens is an optical product, which is a divergent linear virtual image used to control the size of the light beam in only one direction. Combined with a plano-convex cylindrical lens, it can be used to shape the elliptical beam of a semiconductor laser into a circular beam. Plano-concave cylindrical mirrors can be used in projection systems, imaging systems, optical instruments, and laser measurement systems. Plano-concave cylindrical mirrors are also commonly used to convert a collimated laser source into a line light source, and plano-concave cylindrical mirrors are often used for beam expansion applications. Compared with spherical lenses, cylindrical lenses are more difficult to manufacture.Cylindrical lens is mainly used to change the design requirements of imaging size. For example, convert a point spot into a line spot, or change the height of the image without changing the desired width. The special optical performance of cylindrical mirrors. With the rapid development of high technology, cylindrical mirrors have become more and more widely used.
Concave Cylinder Lens,Cylinder Lens Concave,Convex Cylindrical Lens,Cylinder Rod Lenses Bohr Optics Co.,Ltd , https://www.bohr-optics.com