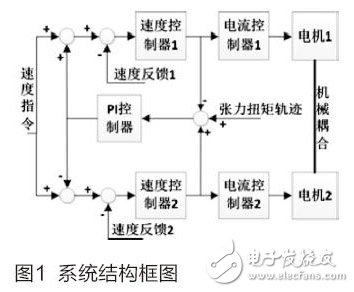
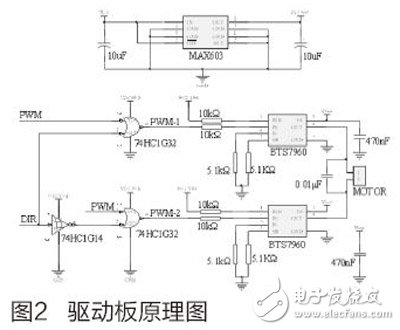
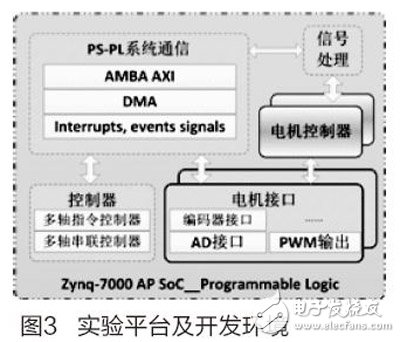
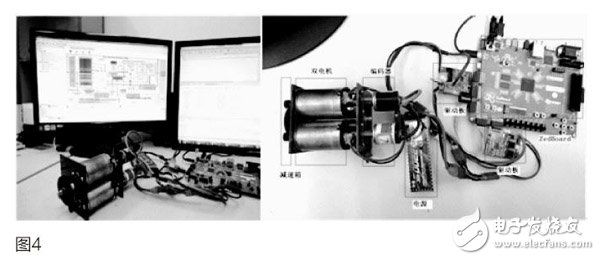
Abstract: The rapid development of embedded technology has injected new vitality into the research and application of motion control systems, and has greatly reduced development costs and cycles. This paper implements multi-motor drive, motor controller, multi-motor series controller, online debugging and other functions in the ZedBoard development platform, highlighting the rich resources and flexible configuration of the Zynq-7000 AP SoC series processor. The system uses the integrated half-bridge driver BTS7960 to achieve a highly efficient motor drive board design. The software and hardware collaborative design method is used in the design method, and the development time is effectively shortened on the basis of greatly expanding the system function. Motion control systems are widely used in industrial automation. The system requirements are becoming more and more complex, and the system's response speed and accuracy requirements are getting higher and higher. Multi-axis series control technology has been widely used in the industry, mainly used to eliminate the transmission gap, drive large inertia, high load objects. The use of multi-axis series control technology can not only improve the impact of system drive clearance, but also improve the system's response performance and robustness. Due to the difference in the performance of the drive motor between the various axes, it is difficult to achieve the desired control effect using the conventional speed control scheme or the master-slave structure scheme. Professor Y. Koren proposed a cross-coupling control scheme in 1980 and gradually applied it to multi-axis series control systems. But to achieve this solution requires complex hardware design, powerful real-time computing power, expensive system configuration, and high system power consumption. The Zynq-7000 Al l Programmable SoC (Zynq-7000 AP SoC) is a new All Programmable solution from Xilinx that addresses the challenges of advanced motion control, real-time industrial networking, machine vision and next-generation industrial automation applications. The Zynq-7000AP SoC integrates a dual-core Cortex-A9 MPCore processor system with ARM TrustZone security technology supporting Xilinx 28nm programmable logic. At the same time, Zynq-7000 integrates a wealth of logic resources, and its Programmable Logic (PL) part contains about 1.3M equivalent logic gates and 220 DSP Slices. These logical resources provide a complete advanced motion control solution. This design realizes a complete set of system functions from the bottom drive to the host computer human-computer interaction through the ZedBoard development system. The system design realizes fast and efficient system development by virtue of the powerful performance of ZedBoard development system and the perfect hardware support of Maxim. The pre-system model and analysis were done using Matlab. Through the mutual support of Matlab and Xilinx products, designers can quickly determine the controller scheme and implementation details. This design implements the motor drive, cross compensation unit, and motor standard interface in the ZedBoard development system. Two DC motors are connected to the outside of the system. The real-time status of each motor is also fed back to the host computer through the interface, and can be passed to Matlab for data analysis and parameter debugging. Both the motor-driven PI controller and the compensated PI controller of the system are implemented using PL. Due to the use of Xilinx's DSP development kit System Ge nera to r (XSG), the development cycle is shortened and development is less difficult. In the Ma tl ab/Simulink simulation environment, the relevant PID module is designed. With XSG, the system can directly generate PL executable modules. This module can be simulated with Matlab and other modules. Parameter adjustment through this function will greatly save development time. On this basis, the design uses a cross-compensation scheme to complete the motor series control. In addition to the single-motor drive structure, the system increases the tension torque PI compensation to control the torque relationship required for the two motors to maintain synergistic backlash. The block diagram of the designed system is shown in Figure 1. The tension torque trajectory represents the relationship between the torques of the two motors. The meaning of the command indicates the difference between the current commands driven by the two motors, and the physical meaning indicates the difference between the output torques of the two motors. The above controller is implemented using the Zynq-7000 AP SoC design. The Processing System (PS) porting implements the Natural TIny Shell (NTShell, an open source command parser for small embedded systems) as a human-computer interface. The PL part implements the system control algorithm. The system uses the Zynq-7000 AP SoC internal bus channel M_AXI_GP bus as the command and data transmission channel of PS and PL. The system controller is mounted on the M_AXI_GP bus as an IP core with an AXI slave interface. The bus interface and the porting of the user code and the encapsulation of the IP core are all done with the help of the tool guide "Create and Import Peripheral Wizard" of the Xilinx development environment XPS. The system realizes the integrity and real-time of the control command signal by means of the AXI internal bus, and realizes the dynamic configuration of the controller parameters. The system communicates with the Personal Computer (PC) serial terminal through Universal/Asynchronous Receiver/Transmitter (UART), and can display system information directly in the terminal interface. The semaphore that the PL can send to the PC terminal through the PS includes parameters of each controller, speed signal deviation, current signal deviation, compensator output, and the like. Through the PC terminal, the user can set individual controller parameters, speed setpoints, tension torque track values, and so on. ZedBoard-based motion control system motor drive design has been selected, integrated price, supply stability, and drive performance. This motor drive scheme uses a half-bridge driver BTS7960 chip. The driver is capable of driving current 43A and inputting a maximum voltage of 45V. The design power management chip uses the Maxim chip MAX603 to achieve 5V voltage regulation. The schematic diagram of the driver board is shown in Figure 2. The design is powered by a lithium battery with a rated voltage of 11.1V, and is regulated to a 5V level by a regulated voltage regulator. The 5V level powers all digital logic and incremental encoders on the driver board. The driver board input signal is the Pulse-Width ModulaTIon (PWM) signal output from the multi-axis controller and the motor rotation direction signal. The two signals are processed by the drive logic circuit and input to the BTS7960 chip. Two BTS7960 chips form an H-bridge motor drive circuit. In this design, the PL part of Zynq implements a multi-axis series controller. The main units include PS-PL system communication module, signal processing module, motor drive module, multi-axis controller module, motor interface module and so on. A state machine is used to jump between the various parts. The use of PL to achieve the above functions allows the system to run at high speed in real time and achieve seamless information exchange. The specific hardware design block diagram is shown in the figure. Based on the above hardware block diagram, the general counter module is implemented by using PL. This module is used to control the jump of the entire state machine. The module counts the overflow signal as a flag signal for the state machine jump. Through strict timing control, multiplexing and signal synchronization of each module can be realized. For example, the two motor speed closed-loop controllers and the compensation PI controller in the system are time-division multiplexed with the same PID controller module. The system contains two PWM modules, which ensure that the motor's drive signal is updated and executed in parallel. The experimental platform and development environment of this system are shown in Figure 3. These include the Xilinx ISE Design Suit 14.1 development environment, dual motor lab, motor drive module, ZedBoard, 11.1V-3S1P lithium battery. The complete system is implemented on Z ed B oard's XC7Z20 chip, which occupies only 1119 Slices of PL and 3 DSP48E1s, which is 8% of the PL resources of the chip. It can be seen that the system realizes the multi-axis serial control system by occupying only a small amount of on-chip resources. Some modules are reused through timing control to achieve efficient resource utilization. Summary This system utilizes the ZedBoard development platform based on the Xilinx Zynq-7000AP SoC series processor to implement a multi-axis serial control system. The main design of the design: (1) Realize multi-axis control algorithm and motor drive control, which can drive at least 2 motors to run in series connection state. The control system can effectively exert the performance of each single-axis drive, ensuring rapid response of the system and strong anti-disturbance capability. (2) The system implements the human-computer interaction interface based on NT-Shell. The user can use the host computer to debug and monitor the system, and the system parameters can be dynamically configured online. (3) The system supports a reconfigurable universal interface that can be connected to different motor drives. The system is highly versatile and can be applied to different occasions. (4) The project is developed using a software/hardware collaborative design approach. System development is highly efficient and it is easy to develop customized services and extensions based on user needs. (5) Using Matlab scientific computing software to assist in the development of embedded systems and controller design and debugging, to improve the efficiency and flexibility of controller development. Aluminum Frame LV 3PH Asynchronous Motor Aluminum Frame Lv 3Ph Asynchronous Motor,Three-Phase Asynchronous Motor,3 Phase Asynchronous Induction Motor,Aluminum Frame Three Induction Motor Yizheng Beide Material Co., Ltd. , https://www.beidevendor.com