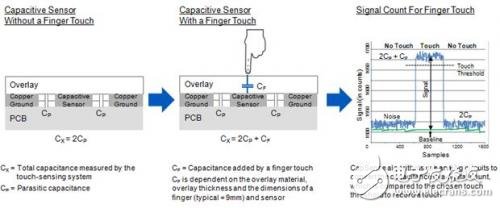
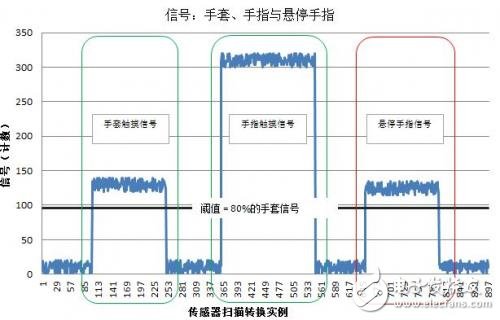
Capacitive touch-sensing user interfaces are gradually replacing mechanical buttons for products in the consumer, medical, and industrial sectors. However, with the advent of the touch-sensitive user interface, end users also need advanced features such as tactile support and glove touch that simulate mechanical button functions, as well as stylus support and proximity sensing. These features can improve the overall user experience of the product and provide opportunities for manufacturers to stand out. This article focuses on one of the above features - glove touch, which is increasingly used in consumer, industrial and medical applications. For example, even if the user wears gloves due to cold weather, the touch interface of the wearable smart wristband should work properly, and the medical laboratory equipment should operate normally when touched by latex gloves. However, implementing a glove touch on a capacitive touch interface is not an easy task, and most implementations often only provide unreliable, inconsistent performance. This article is dedicated to the challenge of implementing glove touch on capacitive touch buttons and how to solve related challenges to design a robust, reliable touch-sensing interface with glove touch. There are two major challenges in achieving a reliable glove touch, namely: -Detect weak signals generated by gloved hands - Ignore false positive touches caused by fingers hovering over the sensor Understand why a glove touch produces a weak signal Capacitive touch sensing works by changing the capacitance of the sensor when the finger touches the overlay of the sensor. The touch-sensing controller measures this change in capacitance and converts it to the digital domain (analog-to-digital conversion). A touch operation is recorded when the measured value exceeds a predefined threshold. A digital capacitance change caused by a finger touch is called a signal, and an unexpected change in the digitized capacitance that is not caused by a finger touch is called noise. A reliable touch sensing system recommends a 5:1 signal-to-noise ratio (SNR). Figure 1 illustrates how capacitance is measured in a touch sensing system. In short, the capacitance produced by a finger can be considered as a parallel plate capacitor where the finger and sensor are two conductive plates and the cover layer is the dielectric between the plates. The change in capacitance produced by the finger is proportional to the size of the sensor, the finger (ie, the area of ​​the plate), and the dielectric constant of the cover material; however, it is inversely proportional to the thickness of the cover layer on the sensor (ie, the distance between the plates). The thicker the cover layer, the greater the distance between the plates, so that the capacitance change is smaller. This will reduce the signal to noise ratio. Figure 1 – Capacitance measurements in a touch-sensing system. When the finger wears the glove, a new cover layer proportional to the thickness of the glove is added over the existing cover layer to increase the total thickness of the cover layer. It reduces the signal strength below a predefined threshold, so it is generally impossible to detect the touch operation of a gloved hand. This is why most users remove the gloves to effectively touch the buttons of the capacitive touch-sensitive interface. By increasing sensitivity, the touch sensor can be tuned to support thicker overlays. Similarly, the touch sensor is calibrated to detect the touch of the gloved hand. Increasing the sensitivity of the sensor means that it only needs a smaller change in capacitance to detect the touch. However, the challenge here is that it creates a situation known as "unexpected hovering" where a light finger approaching the sensor (hovering over the sensor) produces a capacitance change equivalent to the glove touch. The wrong touch is recorded as a glove touch, and the glove is not worn even though the finger is not touching the sensor. This situation generally does not meet the needs and will adversely affect the user experience of the product. Figure 2 shows the signals generated by the glove touch, finger touch, and hovering fingers. Figure 2 – Signals from glove touch, finger touch and hovering finger As a result, designers face the following problems: systems that are tuned for normal touch sensing cannot detect the touch of a gloved hand, while systems that are tuned for glove touches can cause false positive touches due to "unexpected hovering." A simple, but ingenious solution is to add user-triggered interrupt signals or physical switches to the design to indicate if they are wearing gloves. This can jeopardize the user experience, especially consumer products that require “thin operations†and medical products that need to operate in all situations.
We've been around for over 16+ years. We make sure our sound is The Best Sound.
Manufacturing high-quality products for customers according to international standards, such as CE ROHS FCC REACH UL SGS BQB etc.
wholesale earbuds, earbuds in bulk, earbuds custom, true wireless earbuds TOPNOTCH INTERNATIONAL GROUP LIMITED , https://www.micbluetooth.com