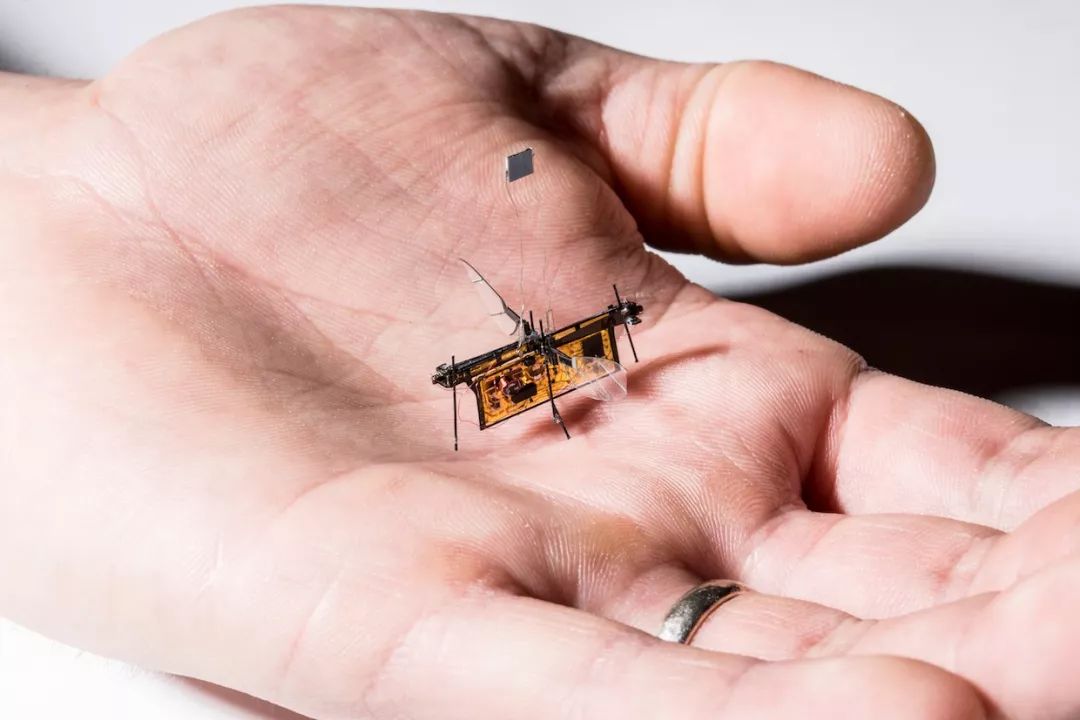
Foreword Remember Robobee at Harvard? The coin-sized light drone also learned a lot of skill in recent years. Can rely on flapping wings to fly, rely on electrostatic adsorption in the leaves under the small ripples, by electrolysis of water against the surface tension of water to complete the amphibious transformation from underwater to air. In short, since the advent of the small Robobee has occupied a very important seat in the robot family of Harvard. However, many times, Robobee's fatal weakness has never been changed. In order to meet the ultra-light qualities of robots, they have no way to carry relatively heavy batteries on their backs, but can only be powered by thin, external power cords. . Although this temporarily satisfies Robobee's demand for electricity, it also determines that it can't really achieve free and controlled flight. Can only walk in a small area in the laboratory. It is interesting to note that Harvard did not complete the task of removing the power cord, but it was completed in disguise by Sawyer Fuller, one of the first researchers of its R&D team. Sawyer Fuller brought relevant technologies to the University of Washington and co-developed another RoboFly robot with other researchers at Washington University. RoboFly successfully removed two thin power cords and became the world's smallest wireless flying robot. Saying that Fly seemed to be a bit overpowered by the current RoboFly tone, because from the human eye, it was only slightly stunned without wire pulling. But this small step is a substantial step for the mini drone, because the RoboFly completes a small flight without a power cord and no load battery. According to reports, the tiny RoboFly was only lost more than a toothpick. It was driven by a laser beam. When the laser beam hits a photovoltaic cell mounted on top of the robot, the robot can convert light energy into electrical energy. The power voltage at this point is 7V, they also need a circuit board to raise the voltage of 7V to 240V to drive the wings of the robot. Because the team currently uses only a fixed laser beam, RoboFly can only fly a short distance. Moreover, RoboFly removed the power cord and cut it off. The most important thing was that the researchers installed a flies-like "brain." The micro-controller mounted on the circuit board told RoboFly when to take off. According to the situation, it is also predicted that "now wings are difficult to flap" or "do not flap". Some media claimed that this may be a small step in the field of robotics, but it is a big step for flying robots. Sawyer Fuller, one of the team’s research members, said, “Before, insect-sized wireless flying robots existed only in science fiction movies. We made this all a reality. Obviously, our new wireless RoboFly is closer to real life.†Another researcher, Gollakota, said that while RoboFly is currently powered by a laser beam, future versions may use miniature batteries or derive power from radio frequency signals. In this way, their power supply can be modified according to specific tasks. And in the future, RoboFly may also have more advanced brain and Sensor systems to help robots navigate and complete their tasks. The team’s researchers also stated, “I really want to make a product that finds a methane leak. You can buy a suitcase full of them, turn it on, they will fly around your building, looking for a leak pipe. The gas that comes out of them.If these robots can easily find leaks, they will be more likely to be repaired, which will reduce greenhouse gas emissions.This is inspired by real flies, they are really good at looking around for odorous So we think this is a good application for RoboFly." Expect RoboFly to become a cluster robot that comes out of science fiction movies, but before it grows into a cluster robot, let's take a look at RoboFly that just flew a little bit. Incremental Encoder is commonly used, and Absolute Encoder is used if there are strict requirements on position and zero position. Servo system should be analyzed in detail, depending on the application situation. Commonly used incremental encoder for speed measurement, which can be used for infinite accumulation measurement; Absolute encoder is used for position measurement, and the position is unique (single or multiple turns). Finally, it depends on the application situation and the purpose and requirements to be realized. Incremental Linear Encoders,Linear Optical Encoder,Linear Position Encoder,Encoder Bearing Tester Yuheng Optics Co., Ltd.(Changchun) , https://www.yhencoder.com